| [ Новые сообщения · Участники · Правила форума · Поиск · RSS ] |
|
   |
| Форум Помощь по созданию модов Общие вопросы Настройка автомобиля под GTA: SA (Автор lHllKllSl) |
| Настройка автомобиля под GTA: SA | |||||||||
| |||||||||
| |||||||||
| |||||||||
| |||||||||
|





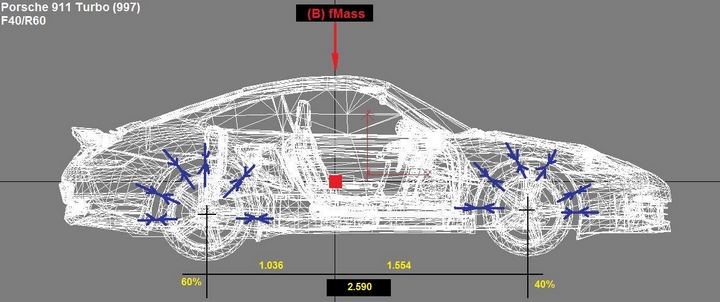
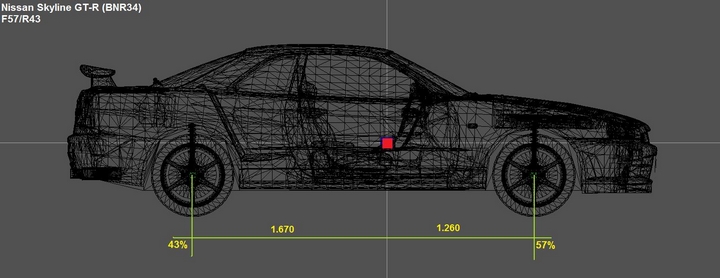
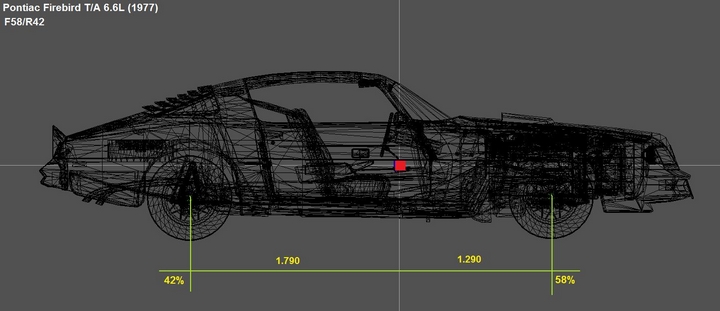
 (положения главного дамиса). Например, для Порше оно будет - 0.40, для Ская - 0.57, для Транс Ама - 0.58. Чтоб в игре не было перекоса кузова вперед или назад, из-за недостаточной или излишней жесткости.
(положения главного дамиса). Например, для Порше оно будет - 0.40, для Ская - 0.57, для Транс Ама - 0.58. Чтоб в игре не было перекоса кузова вперед или назад, из-за недостаточной или излишней жесткости. 
| |||
| |||
| [ Новые сообщения · Участники · Правила форума · Поиск · RSS ] |
|
|
| Форум Помощь по созданию модов Общие вопросы Настройка автомобиля под GTA: SA (Автор lHllKllSl) |
| Настройка автомобиля под GTA: SA | |||||||||
| |||||||||
| |||||||||
| |||||||||
| |||||||||
|
| |||
| |||

